| |
Vertrieb:
SM-Modellbau
KD-Modelltechnik
Oder im gut sortiertem Fachhandel
| Die Antriebsanalyse ja oder nein?
Wer heute eine optimale Elektromotorabstimmung genießt und die Energie effizient umsetzt kommt an einer elektronischen „Live-„ Datenaufzeichnung zum Motorstrom, die Akkuspannung, Drehzahl sowie Temperaturen nicht vorbei. Wenn dann noch die Höhe dazu kommt ist die Grundlage zu Analyse perfekt. Kurz: Die Theorie bereitet vor, die Praxis vollendet mit den Messmöglichkeiten im Schlage eines UniLog von SM-Modellbau. [#1]
Allgemeines
Ich hatte nun das Glück an der Entwicklungsphase aktiv als Beta-Tester mitarbeiten zu können. Was Stephan Merz i. l. d. J. hier geschaffen hat lässt kaum noch Wünsche offen. Grundlage dazu bildet eine komplette- Datenaufzeichnung (Spannung/Strom/Temperatur/Höhe/Drehzahl) direkt im Objekt. Die Geräteanforderungen sind dabei, klein, leicht und leistungsfähig sollen diese Datenlogger sein (s. techn. Daten). Der UniLog erfüllt diese Anforderung da er Spannungen bis 60V, Ströme bis 150A, die Höhe bis 4000m, Drehzahl bis 100.000rpm und Temperaturen bis 125°C erfassen kann. Dazu stellt der UL insgesamt zwei interne (Höhe & Temperatur) und vier externe Messkanäle (Strom - Spannung - Spannung-BEC - Impuls - Temp1 - optional: 2 & 3) zur Verfügung. Der UL kann sowohl über den PC per USB Kabel als auch über das optional erhältliche UniDisplay [#2] programmiert und ausgelesen werden.
Die Bedienungsanleitung ist gut gegliedert und umfangreich illustriert.
(hier bei SM-Modellbau zum Herunterladen) Zum Lieferumfang gehören das USB-Kabel, die Software mit Bedienungsanleitung. Damit lassen sich dann die Höhe und die Umfeldtemperatur aufzeichnen. Ein Shunt (Messwiderstand für den Strom) sollte unbedingt im passenden Stecksystem geordert werden! Die erhältlichen Temperatur- und Drehzahlsensoren sind voll kompatibel mit denen des UniTester 2.
Technik
Das Gehäuse bildet ein stabiler Schrumpfschlauch. Alle Buchsen und Stecker sind im Gehäuse integriert, beschriftet und verwechslungssicher codiert. Mit dem Taster ist eine zusätzliche manuelle Bedienung (Start-Stop-Reset) gewährleistet.
Klein, leicht, vielseitige und komfortable Stecksysteme beißen sich - aber der gefundene Kompromiss am UL ist okay. Wer etwas Vorsicht beim Hantieren walten lässt wird lange Freude daran haben. Die Shunts sind extern anschließbar und in unterschiedlichen Normungen von 2mm bis 6mm, bzw. MPX-System gestaffelt. [#3] Die aufwendige Elektronik (Mikroprozessor) und kalibrierte Shunts garantieren eine hohe Genauigkeit aller Messdaten die auf dem Niveau des UniTester 2 liegen.
Die größte Hürde war bisher die Geschwindigkeit mit der die Daten erfasst wurden. Normale Digitalmessgeräte (DVM) haben eine zwei- bis dreifache Messrate pro Sekunde (Sample-rate per second – S/s). Das ist für eine Datenauswertung viel zu niedrig da Spannungseinbrüche oder Stromspitzen verloren gehen. Das Beispiel zeigt zur Verdeutlichung eine Strom-Impulsspitze mit der Einschaltzeit von 0,1Sekunde und 50A. Diese zu erkennen ist enorm wichtig, da oft „unerklärliche Antriebsstörungen“ hier ihre Ursache haben. [#4] Auf die Erfassung schneller Spannungs- bzw. Stromänderungen wurde viel Wert gelegt. Dazu misst der UL immer alle Sensoreingänge bis zu je 16-mal (sampelt) in der Sekunde – was den UL eben auszeichnet! Die langsamste Einstellung wären alle 10 Sekunden. Der Clou dabei, auch dabei werden immer alle Sensordaten mit der höchsten Sample-Rate (16S/s) erfasst, nur werden die dann rechnerisch gemittelt und als ein Datenpaket abgespeichert ... usw.
Per Software kann der Sample-Wert gestuft vorgegeben werden. Dieser Wert geht entscheidend auf die Speicherzeit mit ein. Dabei gilt, je langsamer die Datenerfassung umso länger die Aufzeichnungszeit. Bei der höchsten Auflösung zeichnet der UL alle Sensoren bis zu 27 Minuten auf, bei der langsamsten bis zu 72 Stunden!
Als PC-Schnittstelle ist eine zeitgerechte USB Schnittstelle vorgesehen. Das ermöglicht den UL komfortabel ohne externen Batterieanschluss zu programmieren oder auszulesen. Der Ul ist einsetzbar ab einer LiPo- oder drei NiXx Zellen. Ist also ohne Kompromisse und mit sicherer Reserve für die RC-Praxis gemacht, die normal bei zwei LiPos oder vier NiXx beginnt. Wird der UL mit aus der Empfängerspannung versorgt ist eine Aufzeichnung ab 0V möglich.
Erste Handhabungen
Die Handhabung ist einfach. Gerade weil die mitgelieferte Software (Excel-Macro) intuitiv bedienbar ist. Nach der Installation des USB-Treibers muss nur noch der COM-Port gewählt werden, danach kann es losgehen. Für den mobilen Einsatz wäre das UniDisplay ideal. [#5] Das hätte dann zusätzlich den Vorteil, dass man auch Vorort alle Daten bequem anschauen und ggf. den UniLog auf neue Anforderungen umprogrammieren kann.
Die Einstellungen beschränken sich auf die Sample-Rate, die Anzahl der Prop-Blätter wenn Drehzahl gewünscht ist und das eigentliche Triggerereignis. [#6] Ist eine Aufzeichnung einmal gestartet (getriggert) lässt sie sich erst wieder durch das Trennen der Batterie und/oder BEC-Versorgung anhalten (anders die Rx-Möglichkeit). Am korrektesten ist es immer zuerst per Taster am UL die Aufzeichnung zu stoppen bevor man den Antriebsakku abzieht – ich empfehle das dringend!
Was bedeuten nun die Triggerereignisse?
Speicherate: Die höchste Einstellung (1/16) ist ideal wenn auch kleinste Strom- bzw. Spannungsspitzen mit erfasst werden sollen. Ich empfehle bei Motormodellen u.ä. die höchste Auflösung, bei Dauerflügen (Segler u.ä.) mit der "viertel bis achtel" Sample-Rate was kontinuierliche Daten bis zu 1:48Std. (bzw. 54Min.) garantiert.
Triggerung nach Strom: Ab dem eingestelltem Limit startet die kontinuierliche Aufzeichnung. Triggerung nach Zeit: Ab der Verzögerungszeit nach dem Anstecken des Akkus startet die kontinuierliche Aufzeichnung.
Triggerung mit beidem: Die sind „ODER“ Verknüpft und das erste zutreffende Ereignis startet die Aufzeichnung.
Triggerung nach Rx: Hier wird ein eigener Empfängerausgang (z.B. Schaltkanal) oder anderer z.B. der Controller-Kanal zum Starten oder Stoppen genommen. Diese Schwelle ist zwischen 1,1ms bis 1,9ms wählbar. Sinnvoll wäre beim Schaltausgang die 1,5ms zu nehmen.
Die Rx-Triggerung ist die komfortabelste weil sie eben ein ferngesteuertes Start/Stop der Aufzeichnung beinhaltet! Gezielte Datenaufzeichnungen sind somit möglich. Dazu werden die Pakete automatisch mit fortlaufenden Nummern (Datensatznummern) gekennzeichnet und lassen sich später leicht identifizieren.
Besonderheiten beim Rx-Triggern:
Wird ein Controller ohne BEC genommen sollte die galvanische Trennung zwischen Antriebsakku und Empfängerakku erhalten bleiben. Dazu ist dann ein Rx-Kabel mit Optokoppler notwendig (optional erhältlich). Die Aufzeichnung der Empfängerspannung ist dann nicht möglich, sowohl aber die des Empfängerimpulses.
Wird ein BEC-Controller genommen reicht das Standardkabel ohne Optokoppler (optional erhältlich) was die BEC-Spannungsaufzeichnung zusätzlich möglicht macht! Der unschätzbare Vorteil dabei, man erkennt sofort Spannungseinbrüche (Umin unter 4,6V) die eine deutliche Überlastung der BEC kennzeichnen! Vorbei also die Unsicherheit:
> ... ist das BEC für meine vier Servos ausreichend dimensioniert? <.
Sind diese Einstellungen geschehen genügt ein Klick auf >Einstellungen setzen< und der UL ist programmiert und einsatzbereit. Die Stauszeile gibt immer eine Rückmeldung. Das Auslesen der Programmierungen erfolgt mit dem Button >>Einstellungen Auslesen<<. Alle weitern Button’s sind selbsterklärend und einfach zu Händeln.
Zur Sicherheit bleibt der alte Speicherinhalt im UL solange erhalten bis er neu überschrieben wird. Das Überschreiben geschieht immer erst dann, wenn vorher der UL gelöscht wurde, sonst wird nur ein neuer Datensatz angehängt!
Tipp: Die Programmierer von LogView, Dominik Schmidt und
Holger Hemmecke, haben sich auch des UL's angenommen und ihn vollständig in die Universalsoftware integriert. Ein Download lohnt
unter der Log-View Page auf alle Fälle. Mit dieser Software haben die Programmierer einen Standard geschaffen der seines Gleichen sucht!
Praxis
Ist eine Datenaufzeichnung erfolg steht man davor, wie darstellen? Hier hilft am Anfang ein wenig Probieren, was sich auf einer Diagrammachse sinnvoll kombiniert abbilden lässt. Es macht z.B. keinen Sinn die Motordrehzahl mit der Akkuspannung auf eine Achse zu setzen, dazu wäre die Skalierung zu ungünstig. Zum besseren Verständnis ein paar Beispiele wie es aussehen könnte.
[#7] Klassische Darstellung einer Flugaufzeichnung des Spannung- und Stromverlaufs.
[#8] Komplette Datenaufzeichnung ohne Drehzahl und externer Temperatur
[#9] Durch Spreizung einer Achse kann erstaunliches abgelesen werden. Hier geht der Motorstrom bei Vollgas erheblich zurück – wie war doch gleich die „pi * Daumen Regel“ dazu: ca. 10%? - hier wird es deutlich(er)! (Bitte das Ergebnis meiner Messungen nicht verallgemeinern, dazu ist eine Antriebsauslegung zu komplex.)
[#10] Die BEC Akkuspannung während des Kunstfluges – einwandfrei stabil um die 5V. Dieses BEC ist also nicht überlastet.
[#11] Hier wurde mal bewusst ein empfangsschwacher Empfänger genommen und die Impulsaufzeichnung von einem nicht benutzten Kanal (6) aufgezeichnet. Überdeutlich sind die Impulsstörungen während des Fluges sichtbar. Normal wären ein bis zwei - wenn überhaupt – Störimpulse.
[# ..] Was bleibt: Temperaturen, Drehzahl und eine Auswertung der GPS Daten. Zur GPS Datenaufzeichnung ist der UniLog schon vorgesehen.
Resümee
Die Auswertung kann richtig neugierig machen. Positiver Randerscheinung dabei: Der Lerneffekt ist hoch und die Gewissheit steigt enorm nach dem Vergleich unterschiedlichster Ergebnisse, dass Optimum zum Modell- und Antriebsauslegung gefunden zu haben. Die Grundausstattung (UniLog mit Shunt nach Wahl) sind für unter 110€ erhältlich. Gemessen am langen Nutzen eigentlich ein Schnäppchen … und wer ihn hat gibt ihn nicht mehr her!
D
|
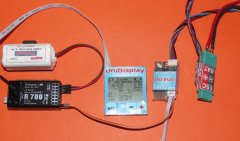
[#1] Die komplette Verkabelung

[#2] Info Darstellung in Verbindung
mit den drei Folientasten
|

[#3] Die Shunts
[#4] folgt noch ...
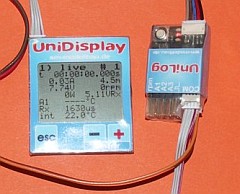
[#5] Das UniDisplay
[#6] Die Datenzentrale
Zur größeren Darstellung einfach
auf die Diagramme klicken und
anschließend "zurück" am Browser. (auf das Bild klicken)
[#7] U-I Standarddiagramm (auf das Bild klicken)
[#8] Zusätzlich mit Impuls und Höhe (auf das Bild klicken)
[#9] Datenspreizung (auf das Bild klicken)
[#10] Mit Empfängerspannung (auf das Bild klicken)
[#11] Empfangsstörungen Technische Daten UniLog V1.01 | | Spannungsmessung | (0V) 3,5V bis 60V
(0,01V Auflösung) | | Strom (Shunt abhängig) | 0A bis 80A
(0,01A Auflösung)
0A bis 150A | | Höhe | 0m bis 4000m
(1m Auflösung) | | Drehzahl | 0rpm bis 100.000rpm
(1rpm Auflösung) | | Empfängerspannungsmessung | 3,5V bis 10V
(0,01V Auflösung) | | Temperaturbereich - extern | -40°C bis 125°C
(1° Auflösung) | | Temperaturbereich - intern | -20°c bis 60°C
(0,1° Auflösung) | | Empfängerimpulsmessung | 0ms bis 3ms
(1µs Auflösung) | | Speicherrate | 1/16s bis 10s | | Speicherzeit | 27Min. bis 72 Std. | | Messkanäle | 6 (+3) | | Abmessungen (LxBxH) | 37 x 22 x 10mm | | Gewicht incl. Kabel | 6g | | Preis | um 89,-€ |
| |
Texte und Photos © Gerd Giese - 31.08.07 / 27.01.07 |
 
|