| |
Der Speedstar is born - ein neuer Brushless-Controller als Bausatz

(... der jetzt fertige Controller)
| Fertige Controller für Brushless-Motoren werden viele
angeboten. Aber für den "Lötfreudigen" unter uns werden nur
wenige als Bausatz angeboten. Außerdem lassen sich "so"
mal schnell beim Selbstbauen, über die eingesparten Kosten,
ein zusätzlicher Akkupack finanzieren.
Der Speedstar von Megra Akkutronic GbR ist einer davon.
Der Komplettbausatz kostet z.Zt: 69,90€.
Ausstattung meines Controllers: BEC mit Kühlblech,
Softwarestand: März 2004 | Technische Daten ( Features) :
- Dauerstrom bis 55 A / Spitzenstrom bis 70 A
6 – 16 Zellen mit geeigneten Transistoren
z. B IRL 2505 S sogar bis 20 und mehr.
- 2 Empfängeranschlüsse wahlweise Optokoppler
und/oder BEC
- Temperatur und Unterspannungsüberwachung.
- Spannungüberwachung einstellbar für Nicd und NiMH
oder Lipo
- RC – Störungsüberwachung .
- Sehr lineare Drehzahleinstellung gemäß Knüppelstellung
- 4 Basis Setups sowie 3 erweiterte Setups.
- Drehzahlabhängige Strombegrenzung über PWM.
- Dynamisches Timing, Vortiming nicht mehr erforderlich.
- Langsamste Drehzahl 150 U/ min bei 14 polig.
- Schnellste Drehzahl bis über 20 000 U/min bei 14 polig .
- Kommutierungen über 170000 möglich
| Der Bausatz ist musterhaft komplett. Es werden auf einer
3,5"-Diskette alle nur erdenklichen Informationen bzw.
Unterlagen mitgeliefert, die es jeden Löterfahrenen
Modellbauer ermöglichen sollte, einen fehlerfreien Controller
selbst zu bauen! Schaltbilder, Bestückungslisten u. -pläne,
Setupinfos und die ausführliche in "Schritt für Schritt"
gegliederte Bauanleitung! Die Bauteile sind nach Gruppen
feinsäuberlich in getrennten Tütchen verpackt.
Der Controller ist zwecks guter Lötbarkeit nicht mit den
kleinsten SMD-Teilen aufgebaut. Die Layout-Handschrift von
Milan Lulić ermöglicht einen unproblematischen und
übersichtlichen Nachbau. Die SMD's haben die Bauform
1206, die Lötpad's genügend Abstand zueinander, sodass
man diese mit einer feinen Lötspitze, ohne Spezialwerkzeug,
löten kann.
Man sieht daran, Herr Eberhard Metzger ist ein Mann der
Praxis!
Maße des Controllers:
80 * 39 * 13mm / 59g (70g - mit Alu-Kühlkörper) mit
kompletten Steckern, Buchsen und 2,5mm2 Zuleitungen.
|
(... die Programmierstiftseite)

( ... die PIC-Seite)

(... Wärmeleitpaste auch für den BEC-Transistor)
| Das Löten beider Seiten war bei mir an zwei Nachmittagen
vollbracht. Mag sein das es schneller geht, aber ich habe in
erster Linie auf Sauberkeit und (Teil-) Funktion wertgelegt,
was auch belohnt wurde - dank der sehr guten Anleitung!
Auf Empfehlung von Herrn Metzger habe ich die
Hochstromleiterbahnen verstärkt um den Controller auch
unter Dauerhochlast betreiben zu können.
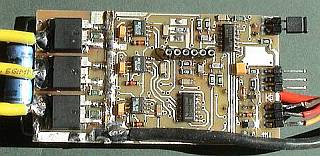
-> Setup-Programmierbuchsenleiste - Nr.:1 - "rechts"
-> Oben/rechts der Programmierjumper
-> Mitte: Optokoppler-, unten BEC-Anschluß
Der Temperaturfühler (orange Perle zwischen den FET's)
sollte möglichst dicht an einem der Leistungs-FET's
anliegen.
Ich habe ihn zusätzlich noch mit einem kleinen Tropfen
Wärmeleitpaste versehen. Er wird mit dem Schrumpfschlauch
in seiner Lage fixiert!
Anm.: Wärmeleitpaste ist nicht mit enthalten!
Auch der BEC-Transistor sollte leicht mit der Paste
eingestrichen werden. Dadurch wird die Wärmekontaktfläche
zum Alu-Kühlkörper verbessert.
Anm: Das dann fertige Produkt ist oben zu sehen!
Man muss es gehört haben: die Setup-Melodien!
Diese heben sich wohltuend von "anderen" ab - für mich
verdeutlicht das die ganze Freude, ja Verspieltheit, eines
Konstrukteurs an seiner Arbeit!
Ab heute zirpt es Märsche aus den Motoren - ich finde es
erfrischend! :-) |
Jetzt die Praxis:
- Referenz-Controller: MASTER 70 - 3P OPTO
- Speedstar: BEC, automatisches Timing, sehr harte Bremse, Anlaufstrom groß, NiCd/Mh-Akku
Die umfangreichen Setupeinstellungen erlauben es den Controller individuell seinen Bedürfnissen, vor allem die des
Motors, anzupassen. Vorsichtig beginnend war mein erster Test an einem 10poligen LRK (Dancer-Pro). Dieser verlief
wie erwartet völlig problemlos.
Danach wechselte ich auf die AXI-Motoren, 14 polige LRK's, auch hier das gleiche Verhalten. Er regelt super weich mit
tadellosem Anlaufverhalten (kaum pendeln des Prop's)!
Jetzt ran an 14Zellen und einen Zweipoler. Der Dauerlauf einer GP3300 Füllung knechtete ihn zwischen 52A und 41A,
wobei Teillast- und Volllastpassagen sich 1:1 abwechselten. Handwarm bei leichter Kühlung (nicht im vollen Propstrahl)!
Das Infrarotthermometer zeigte dabei 44°C an! Ähnliches Bild an einem HP300/30/A3 bei 14Z - 40A im Mittel!
Nun der Härtetest: bei Kleinstdrehzahlen (~2000U/min) und dabei fließenden 4,5A Motorstrom (!) sehr warm, ca. 52°C
nach 3Minuten! In dieser Disziplin verhält sich der Hacker auch nicht anders! Überhaupt empfinde ich das Anlaufverhalten
weicher und angenehmer als beim Hacker, beim Regelverhalten konnte ich keinen Unterschied feststellen.
Drehzahlsprünge habe ich nicht gemessen. Die von mir gemessene Minimaldrehzahl an einem 10 Poler: ca. 1100U/min!
In den von mir gewählten Modi-Einstellungen werden Gas-Knüppelbewegungen sehr spontan, geradezu bissig, umgesetzt!
Neugierig war ich bei dem programmierbaren Lipo-Modus!
Mehrere Tests unterschiedlicher Zellen und Lastströme (5A - 25A) ergaben eine Unterspannungsabschaltung
von umgerechnet 2,75V/Z! -->> PERFEKT ! Eine kurze Gasknüppelbewegung und der Motor läuft wieder!
Resümee:
Ich war überrascht, wie problemlos sich der Controller fertigen (löten) lies! Eine Untersuchung nach dem
Wirkungsgrad des Controllers erbrachte keinerlei Einbußen, bei den gemessenen Last-Drehzahlen der Motoren!
Das automatische Timing funktionierte dabei völlig problemlos. Für die "Problemfälle" kann ein manuelles Timing - vier
Stufen - gewählt werden. Tendenziell ist das automatische Timing in Richtung "scharf" ausgelegt, was die
Leistungshungrigen unter uns freuen wird!
Wunsch: die Jumperfunktion invertieren, also im abgezogenen Zustand ist der Controller Einsatz- und aufgesteckt
programmierbereit und die Kontakte im Layout bündig mit der Platinenkante abschließen lassen.
Mein persönliches Empfinden zu den umfangreichen Setup-Einstellungen:
- zu viel des Guten sind die fünf Bremsstärken - hier hätten drei genügt (hart - mittel - aus).
- die fünf Anlaufstärken, auch hier wären drei genug (hart - mittel - weich).
Ich meine, die 70,-€ sind mehr als fair kalkuliert und gut investiert!
|  | (c) 10.04.2004
Texte und Photos Eigentum von Gerd Giese |  | |
|
